Rst
Concepts of Depth-wise separable convolution
I read “MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications” by Andrew G. Howard, Menglong Zhu, Bo Chen, Dmitry Kalenichenko, Weijun Wang, Tobias Weyand, Marco Andreetto, Hartwig Adam
to understand Depth-wise separable convolution, and i’m going to organize key concepts about that.
- Purpose
- Standard Convolution
- Depth-wise Separable Convolution
- Result
1. Purpose
The purpose of the paper is making light weight Deep Neural Network(in terms of computation).
To achieve that goal, they introduce Depth-wise separabel Convolution and Single global hyper-parameters which efficiently trade off between latency and accuracy.
This article deals with Depth-wise separable convolution.
2. Standard Convolution
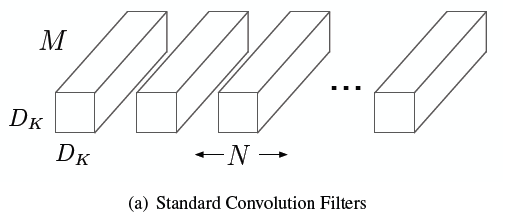
like above image, standard convoluion filters are applied to all channel of input , and each filter makes separate output channel, where $M$ is a number of input channels, $N$ is a number of output channels and $D_k \times D_k$ is kernel size of a filter.
Thus, the standard convolutions have the computational cost of:
$D_k \times D_k \times M \times N \times D_F \times D_F$
where $D_F \times D_F$ is a size of input feature map.
3. Depth-wise Separable Convolution

Depth-wise separable Convolution consists of two types of layers.
each layer is followed by BatchNorm and ReLU like right one of above image.
- Depth-wise conv
- do convolution using one filter per input channel so that number of output channel is same as input
- this separates each channel of input not mixing it.
- Point-wise conv
- do linear combination of the output of depth-wise conv with 1x1 conv
- by doing this, you can control output dimention
3.1. Depth-wise conv
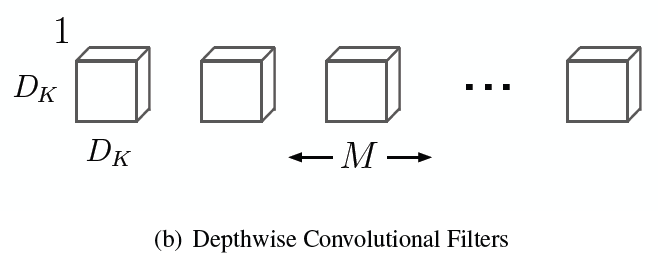 Like above image, Depthwise convolutional filters applied each input channel not mixing them.
Like above image, Depthwise convolutional filters applied each input channel not mixing them.
In the image, $D_k \times D_k$ is kernel size of a filter and $M$ is number of channel(input and output are same).
Thus, computational cost is:
$D_k \times D_k \times M \times D_F \times D_F$
where $D_F \times D_F$ is a size of input feature map.
3.2. Point-wise conv

In the image, $M$ is a number of input channel and $N$ is a number of output channel.
as you can see, this is for linear combination of input channels to fit to number of output channels.
Thus, computational cost is:
$M \times N \times D_F \times D_F$
where $D_F \times D_F$ is a size of input feature map.
4. Result
computational cost
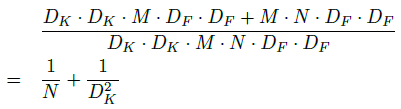 above expression is a result of dividing cost of Depth-wise separable conv by cost of Standard conv.
above expression is a result of dividing cost of Depth-wise separable conv by cost of Standard conv.
as you can see, Depth-wise separable conv is computationally efficient.
accuracy
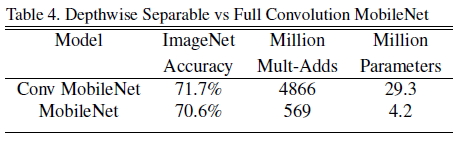 above table shows comparison of accuracy between standard conv(Conv MobileNet) and Depth-wise separable conv(MobileNet).
above table shows comparison of accuracy between standard conv(Conv MobileNet) and Depth-wise separable conv(MobileNet).
There seems to be Pros and Cons between computational efficiency and accuracy.